Динамическая устойчивость электропривода – это способность системы электропривода восстанавливать равновесие при резком изменении режима ее работы.
Асинхронный двигатель при медленно изменяющемся возмущении можно постепенно нагружать до значения опрокидывающего момента.
Но при быстром изменении возмущения динамический момент , алгебраическискладываться с электромагнитным моментом двигателя .
За счет алгебраического сложения динамического момента с электромагнитным моментом система привода развивает момент сверх критического (максимального) момента двигателя при уменьшении скорости и уменьшает развиваемый приводом момент, до значения меньше – критического, при возрастании скорости системы электропривода.
Таким образом, соотношение перестает быть критерием устойчивой работы электропривода. Инерция и запасенная системой энергия имеет большее влияние на работу привода.
Падение напряжения сети
Падение напряжения сети является наиболее характерным резким изменением режима работы электропривода. Падение напряжения в судовой сети может возникнуть: при пуске мощных двигателей или отключении одного из параллельно работающих генераторов.
Двигатель, работающий при статическом моменте на естественной механической характеристике в точке «А» (рис 12-3а.), при снижении напряжения с той же скоростью перейдет в точку «В» на искусственной характеристике.
Под действием возникшего динамического момента, величина которого определяется длиной отрезка «А – В», двигатель будет затормаживаться в соответствии с уравнением движения до полной остановки, точка «D» на искуственной характеристке (ИМХ):
![]() (12-3)
(12-3)
Воспользовавшись соотношенияими: иполучим:
![]() (12-4)
(12-4)
Влияние величины напряжения сети на устойчивость электропривода. Опрокидывание электродвигателя
Рассмотрим влияние напряжения сети на устойчивость электропривода переменного тока.
При глубоких провалах напряжения сети работа асинхронного двигателя становится неустойчивой – двигатель может опрокинуться.
Под опрокидыванием понимают аварийный режим асинхронного двигателя; при котором он останавливается или реверсирует . Условие опрокидывания такое:
М"< М ,
где М" - критический момент двигателя при пониженном напряжении;
М - статический момент механизма.
Иначе говоря, опрокидывание наступит, если критический момент двигателя станет меньше статического момента механизма .
Напомним, что критический момент асинхронного двигателя пропорционален квадрату напряжения:
М = с, (12-5)
где U и f - соответственно напряжение и частота тока питающей сети.
Отсюда следует, что при допускаемом Правилами Регистра провале напряжения
сети, равном 15% (U " = 0,85U ) , новое, пониженное значение критического момента составит
М" = М= (0,85)М= 0,7225 М≈ 0,7 М. (12-6)
Последствия опрокидывания зависят от характера статического момента механизма, а именно:
1. при реактивном статическом моменте двигатель останавливается и переходит в режим стоянки под током (насосы, вентиляторы Рис.12.3а);
2. при активном статическом моменте двигатель вначале останавливается, затем реверсирует и под действием веса груза начинает разгоняться с возрастающей скоростью в направлении на спуск (грузоподъемные механизмы и якорно-швартовные устройства Рис.12.3б).

Рис.12.3а Рис. 12.3б
Рис. 12.3. Переходные процессы при опрокидывании двигателя: а – при реактивном статическом моменте (насос, вентилятор); б – при активном статическом моменте (лебедка, брашпиль).
Рассмотрим процесс опрокидывания двигателя при реактивном статическом моменте исполнительного механизма (Рис.12.3а). До провала напряжения двигатель работает на естественной механической характеристике (ЕМХ), в точке «А» с постоянной скоростью ω.
При провале напряжения двигатель переходит из точки «А» на естественной механической характеристике (ЕМХ) в точку «В» на искусственной механической характеристике (ИМХ) с той же скоростью ω.Скорость электродвига теля не успевает измениться вследствие инерции движущихся частей электропривода, поэтому в точке «В» скорость такая же, как и в точке «А».
Поскольку в точке «В» момент двигателя М меньше момента механизма М , двигатель начинает уменьшать скорость до точки «С». В этой точке критический (максимальный) момент двигателя М "< М , поэтому двигатель продолжит уменьшать скорость до точки Д.
В точке Д двигатель остановится и будет стоять под током с моментом короткого замыкания М до тех. пор, пока не сработает тепловая защита.
Рассмотрим процесс опрокидывания двигателя при активном статическом моменте исполнительного механизма . Механизмы с активным статическим моментом (грузовые лебёдки, брашпили) при опрокидывании реверсируют под действием веса груза или якоря (Рис.12.3б).
В случае провала напряжения судовой сети переходный процесс сначала протекает так же, как в случае с реактивным статическим моментом (Рис.12.3а). Однако после перехода двигателя в точку «Д», двигатель не остановится , а сразу реверсирует и разгоняется в обратном направлении (точки F, F, F).
Поскольку знак электромагнитного момента двигателя не из менился , т.е. направлен в сторону подъёма груза, двигатель перейдёт в режим тормозного спуска и будет стараться уменьшить скорость спуска груза.
Однако при этом скорость спуска груза будет непрерывно увеличиваться . Это объясняется тем, что величина тормозного электромагнитного момента двигателя по мере перехода из точки F в точку Fи далее в точку Fнепрерывно уменьшается (М < М < М ) а величина активного статического момент не изменяется и направлена в сторону спуска груза.
Если электродвигатель своевременно не отключить от сети и не затормозить механическим тормозом, такой режим приведёт к аварии.
Нанесение плёнки на материал заказчика
Бейсболка
МАГНИТЫ и брелоки
КЕРАМИЧЕСКАЯ И МЕТАЛЛИЧЕСКАЯ ПОСУДА
Футболки
· В стоимость входит футболка.
· Цены приведены за 1 прижатие пресса, каждое последующее прижатие 100 рублей.
· Цены приведены за 1 прижатие пресса, каждое последующее прижатие 100 рублей.
· На материале обязательно должен быть ярлычок с составом ткани (для лучшего нанесения подходит 100% х/б ткань)
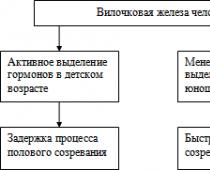
Для того, чтобы определить силы, действующие на элементы зубного ряда, нижняя челюсть рассматривалась в предыдущем разделе, как рычаг. Одиночный зуб с биомеханической точки зрения тоже можно рассматривать как рычаг с осью вращения (точкой опоры), расположенной, примерно, в средней трети корня. Нагрузка, возникающая при обработке пищи, обычно действует вдоль или под углом к вертикальной оси зуба. Она может привести к вертикальному смещению зуба или оказать опрокидывающее действие на него. Рассмотрим последнюю ситуацию. Сила F (рис.4) создает вращающий момент М=F×H 1 относительно оси, проходящей через точку О перпендикулярно плоскости рисунка. Именно этот момент может оказать "опрокидывающее" действие на зуб, то есть при повороте вокруг оси вывернуть зуб из альвеолярной лунки, если ткани периодонта не смогут его удержать. Зуб не меняет своего положения, если момент силы реакции этих тканей будет равен моменту силы F .

Рис. 4 Формирование опрокидывающего момента при действии вертикальной нагрузки на зуб
В практической стоматологии принято различать анатомическую и клиническую коронки зуба. Анатомическая коронка - это часть зуба, покрытая эмалью, клиническая - часть зуба, выступающая над десной, она может включать в себя анатомическую коронку и часть корня (рис.4, правая часть). С возрастом, вследствие атрофии десны, обнажается часть корня, увеличивается клиническая коронка, ось вращения располагается ниже, чем у нормального зуба (теперь она проходит через точку О 1 .), увеличивается плечо действующей на зуб силы (вместо Н 1 −Н 2 на рис.4). Это приводит к росту "опрокидывающего" момента (здесь М=FН 2) и увеличению вероятности травмирования и потери зуба.
Предельный кренящий момент, превышение к-рого, согласно расчету, приводит к опрокидыванию судна. Для определения О. м. используют диаграммы остойчивости. О. м. при его статич. действии равен макс, ординате диаграммы статич. остойчивости, построенной в масштабе моментов. О. м. в случае динам, (внезапного) действия на судно, находящееся в прямом положении, определяют: 1) по диаграмме статич. остойчивости из условия равенства заштрихованных площадей; 2) по диаграмме динам, остойчивости, построенной в масштабе плеч, проведением касательной из нач. координат. Ордината касательной при абсциссе, равной 1 рад, показывает плечо /опр, к-рое при умножении на силу тяжести судна (равную произведению его объемного водоизмещения на удельный вес воды), определяет искомый момент.
«ОПРОКИДЫВАЮЩИЙ МОМЕНТ» в Интернете:
Морские анекдоты
Встречаются два моряка. Поговорили о всяком. Тут один говорит другому:
- Мы уже пол-часа разговариваем, а ты все время показываешь мне язык! В чем дело?
- Это я не язык тебе показываю, это у меня после праздников печень торчит.
Влияние на устойчивость электропривода напряжения сети.
Рассмотрим влияние напряжения сетина устойчивость электропривода перемен
ного тока.
При глубоких провалах напряжения сети работа асинхронного двигателя становит
ся неустойчивой – двигатель может опрокинуться.
Под опрокидыванием понимают аварийный режим асинхронного двигателя; при ко-
тором он останавливается или реверсирует. Условие опрокидывания такое:
М"< М ,
где М" - критический момент двигателя при пониженном напряжении;
М - статический момент механизма.
Иначе говоря, опрокидывание наступит, если критический момент двигателя станет меньше статического момента механизма.
Напомним, что критический момент асинхронного двигателя пропорционален квадрату напряжения:
где U и f - соответственно напряжение и частота тока питающей сети.
Отсюда следует, что при допускаемом Правилами Регистра провале напряжения
сети, равном 15% (U" = 0,85U ) , новое, пониженное значение критического момента составит
М" = М= (0,85)М= 0,7225 М≈ 0,7 М.
Последствия опрокидывания зависят от характера статического момента механиз
ма, а именно:
1. при реактивном статическом моменте двигатель останавливается и переходит в режим стоянки под током (насосы, вентиляторы);
2. при активном статическом моменте двигатель вначале останавливается, затем реверсирует и под действием веса начинает разгоняться в направлении на спуск с возра
стающей скоростью (грузоподъемные механизмы и якорно-швартовные устройства).

Рис. 8.11. Переходные процессы при опрокидывании двигателя: а – при реактивном статическом моменте (насос, вентилятор); б – при активном статическом моменте (лебед-
ка, брашпиль)
Рассмотрим процесс опрокидывания двигателя при реактивном моменте механизма
(рис. 8.11, а).
До провала напряжения двигатель работает на естественной механической характе-
ристике (ЕМХ) в точке А с постоянной скоростью ω.
При провале напряжения двигатель переходит из точки А на ЕМХ в точку В на искусствен
ной механической характеристике (ИМХ). Скорость электродвигателя не успевает изме-
ниться вследствие инерции движущихся частей электропривода, поэтому в точке В скорость такая же, как и в точке А.
Поскольку в точке В момент двигателя Мменьше момента механизма М, двига
тель начинает уменьшать скорость до точки С. В этой точке критический (максимальный) мо-
мент двигателя М"< М, поэтому двигатель продолжит уменьшать скорость до точки Д.
В этой точке двигатель остановится и будет стоять под током с моментом короткого за-
мыкания Мдо тех. пор, пока не сработает тепловая защита.
Механизмы с активным статическим моментам (грузовые лебёдки, брашпили) при опрокидывании реверсируют под действием веса груза или якоря.(рис.8.11, б).
Переходный процесс при провале напряжения сначала протекает так же, как в предыду-
Динамической остойчивостью называется способность судна противостоять, не опрокидываясь, динамическому воздействию внешних моментов.
До сих пор при рассмотрении вопросов остойчивости предполагалось, что кренящий момент действует на судно статически, т.е. кренящий момент m кр был равен восстанавливающему моменту m Θ . Это могло быть:
1) либо при столь медленном нарастании m кр, что в любой момент осуществлялось равенство m кр = m Θ ;
2) либо в положении судна, когда с момента m кр приложения прошло достаточно много времени.
В действительности во многих случаях кренящий момент прикладывается к судну динамически (накат волны, шквальный ветер и т.п.). В этих случаях нарастание кренящего момента происходит быстрее, чем восстанавливающий момент и равенство между моментами не соблюдается. В результате процесс наклонения судна совершается с ускорением.
Наибольший угол крена, которого достигает судно при наклонении с ускорением, называется динамическим углом крена Θ дин. Величина Θ дин значительно превышает величину статического угла крена Θ с (при m кр.дин = m кр.ст). Возможен случай, когда при значительном угловом ускорении величина Θ дин окажется настолько большой, что судно опрокинется (при неопасном для судна статическом приложении равного по величине m кр).
В теории судна при изучении динамических наклонений обычно делается допущение, что вода и воздух не оказывают сопротивления такому наклонению; это допущение приводит к погрешности в безопасную сторону.
3.11.1 Наклонение судна при динамическом воздействии кренящего момента. Предположим, что к судну, имеющему Θ = 0, динамически приложен момент m кр, который затем продолжает действовать статически, не изменяясь по величине с изменением угла крена Θ (рис. 3.25).
На участке наклонения судна от Θ = 0 до Θ ст, когда m кр > m Θ , происходит накопление кинетической энергии за счет избыточной работы кренящего момента, угловая скорость растет dΘ/dt, угловое ускорение d 2 Θ/dt 2 положительное, но величина его уменьшается вследствие противодействия восстанавливающего момента. При Θ = Θ ст, когда m кр = m Θ , скорость наклонения судна и кинетическая энергия достигают максимальных значений, а ускорение равно нулю.
На участке наклонения судна от Θ ст до Θ дин, когда m кр < m Θ , накопленная ранее кинетическая энергия погашается противоположной по знаку избыточной работой восстанавливающего момента, скорость наклонения уменьшается, ускорение отрицательное и с нарастанием угла Θ величина его растет. Наклонение судна прекращается в точке Θ дин, в которой наблюдается равенство работ кренящего А кр и восстанавливающего моментов А Θ . Эти работы можно записать как

Рисунок 3.25 – К рассмотрению динамических наклонений
Положение судна с Θ = Θ дин не является положением равновесия. Под действием избыточного восстанавливающего момента судно начнет спрямляться (до Θ = Θ ст ускоренно, а затем замедленно) и придет в положение Θ = 0 (при отсутствии сил сопротивления) с нулевой угловой скоростью. После этого явление повторяется - судно будет колебаться около положения Θ = Θ ст. При отсутствии сопротивления этим колебаниям со стороны воды и воздуха они могли бы продолжаться бесконечно. В действительности судно совершает в рассматриваемом случае затухающие колебания и в итоге останавливается в положении равновесия с углом Θ ст.
3.11.2 Определение динамического угла крена судна. Запас динамической остойчивости. Величину угла Θ дин при воздействии на судно момента m кр заданной величины можно найти с помощью равенства работ А кр = А Θ при наклоне Θ = Θ дин
(m кр – m Θ) dΘ = 0,
или (m кр – m Θ) dΘ + (m кр – m Θ) dΘ = 0
или (m кр – m Θ) dΘ = (m Θ – m кр) dΘ,
 где интеграл (m кр – m Θ) dΘ = δА кр выражает собой избыточную работу кренящего момента на участке наклонения судна от Θ = 0 до Θ ст, а интеграл (m Θ – m кр) dΘ = δА Θ - избыточную работу восстанавливающего момента на участке наклонения судна от Θ ст до Θ дин.
где интеграл (m кр – m Θ) dΘ = δА кр выражает собой избыточную работу кренящего момента на участке наклонения судна от Θ = 0 до Θ ст, а интеграл (m Θ – m кр) dΘ = δА Θ - избыточную работу восстанавливающего момента на участке наклонения судна от Θ ст до Θ дин.
Рисунок 3.26 – К определению динамических углов крена судна.
На рис. 3.26 работа кренящего момента А кр представляет собой прямоугольник ОКВD, а работа восстанавливающего момента А Θ – криволинейную трапецию ОАМВD. Заштрихованные площади 1(ОКА) и 2 (АМВ) соответствуют избыточным работам кренящего δА кр и восстанавливающего моментов δА Θ .
Следовательно, угол Θ дин может быть определен по диаграмме статической остойчивости графически из условия равенства по величине площадей 1 и 2.
Как видно из рис. 3.26, при типичном виде диаграммы статической остойчивости Θ дин » 2 Θ ст.
Из сказанного выше очевидно, что работа восстанавливающего момента может служить мерой динамической остойчивости судна. Площадь на ДСО под кривой m Θ (Θ) ОАМВN (на рис. 3.26), характеризующую собой работу А Θ , называют запасом динамической остойчивости судна (ЗДО). Чем больше эта площадь, тем большей динамической остойчивостью обладает судно при плавании в прямом положении. При рассмотрении рисунка 6.3, становится очевидным, что чем меньше метацентрическая высота судна, тем меньше не только запас статической остойчивости, но и динамической. При плавании судна со статическим углом крена Θ ст.1 запас динамической остойчивости уменьшается и на рисунке 3.26 он определяется только площадью АМВ между кривой m Θ (Θ) и m кр (Θ).
3.11.3 Пределы динамической остойчивости судна. Такими пределами являются:
Максимальный кренящий момент m кр.дин. max , динамическое приложение которого еще не вызывает опрокидывание судна (опрокидывающий момент );
Максимальный динамический угол крена Θ дин. max .
Для нахождения величин m кр.дин. max и Θ дин. max можно использовать диаграмму статической остойчивости (рис. 6.11). По мере увеличения m кр. угол Θ дин растет. При некотором m кр. = m кр.дин. max , что соответствует предельному случаю равенства площадей 1 и 2, когда еще может быть обеспечено равенство избыточных работ восстанавливающего и кренящего моментов, угол Θ дин = Θ дин. max . Следовательно, Θ дин. max определяется точкой пересечения графика m кр (Θ), отвечающего m кр.дин. max , с нисходящей ветвью ДСО.
Если при динамическом приложении кренящего момента его величина m кр > m кр.дин. max , то избыточная работа кренящего момента уже не может быть полностью погашена избыточной работой восстанавливающего момента, и судно опрокинется. При статическом приложении такого же по величине момента m кр безопасность плавания судна обеспечивается, если только m кр £ m кр.ст. max . Из рис. 3.26 видно, что m кр.дин. max < m кр.ст. max .
Таким образом, динамическая остойчивость судна при воздействии m кр заданной величины обеспечена, если динамический угол крена не превосходит значения, при котором работа кренящего момента еще может быть компенсирована работой восстанавливающего момента.
3.11.4 Диаграмма динамической остойчивости судна. Для решения задач динамической остойчивости удобно использовать диаграмму динамической остойчивости (ДДО), которая определяет работу восстанавливающего момента А Θ при каждом значении угла Θ (рис. 3.27).
Как известно, работа восстанавливающего момента по углу крена может быть представлена выражением
А Θ = m Θ dΘ,

Рисунок 3.27 – Диаграмма динамической остойчивости
где функция m Θ (Θ) представляет собой диаграмму статической остойчивости (ДСО).
Таким образом, ДДО является интегральной кривой по отношению к ДСО. Как всякая интегральная кривая, она обладает следующими свойствами:
1) каждая ее ордината выражает собой площадь под ДСО по эту ординату;
2) точка перегиба (точка В) соответствует максимуму ДСО;
3) максимум интегральной кривой (точка С) соответствует углу заката ДСО;
4) ордината ДДО при Θ = Θ зак определяет собой запас динамической остойчивости судна в прямом положении равновесия;
5) тангенс угла касательной, проведенной к диаграмме динамической остойчивости, определяет ординату диаграммы статической остойчивости при том же угле крена.
Так как m Θ = γV l Θ , то выражение для работы восстанавливающего момента можно записать в виде
А Θ = m Θ dΘ = γV l Θ dΘ = γV l Θ dΘ = γV l дин,