Расчет фундамента на устойчивость должен исключать возможность его опрокидывания, сдвига по основанию и сдвига совместно с грунтом по некоторой поверхности скольжения. Фундамент считают устойчивым, если выполняется условие (6.1), в котором под F понимают силовое воздействие, способствующее потере устойчивости (опрокидыванию или сдвигу) фундамента, а под Fu - сопротивление основания или фундамента, препятствующее потере устойчивости. Расчеты устойчивости выполняют по расчетным нагрузкам, полученным умножением нормативных нагрузок на коэффициенты надежности по нагрузке. Если для одной и той же нагрузки нормами предусмотрены два коэффициента надежности, то в расчете учитывают тот из них, при котором будет меньший запас устойчивости.
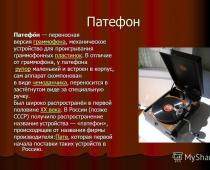
Рис. 7.7. Схема к расчету фундамента на устойчивость против опрокидывания
При расчете фундаментов опор мостов на устойчивость против опрокидывания все внешние силы, действующие на фундамент (включая его собственный вес), приводят к силам Fv, Qr и моменту Мu (рис. 7.7). Силы Fv и Qr равны проекциям всех внешних сил соответственно на вертикаль и горизонталь, а момент Ми равен моменту внешних сил относительно оси, проходящей через центр тяжести подошвы фундамента перпендикулярно расчетной плоскости. Момент Ми способствует опрокидыванию фундамента (повороту его вокруг оси О - см. рис. 7.7). Момент Mz, сопротивляющийся опрокидыванию, будет равен Fva, где а - расстояние от точки приложения силы Fv до грани фундамента, относительно которой происходит опрокидывание.
Устойчивость конструкций против опрокидывания следует рассчитывать по формуле
Ми≤(ус/уn)Мz, (7.5)
где Мu и Мz - моменты соответственно опрокидывающих и удерживающих сил относительно оси возможного поворота (опрокидывания) конструкции, проходящей по крайним точкам опирания, кН·м; ус - коэффициент условий работы, принимаемый при проверке конструкций, опирающихся на отдельные опоры, для стадии строительства равным 0,95; для стадии постоянной эксплуатации равным 1,0; при проверке сечений бетонных конструкций и фундаментов на скальных основаниях, равным 0,9; на нескальных основаниях - 0,8; уn - коэффициент надежности по назначению сооружения, принимаемый равным 1,1 при расчетах для стадии постоянной эксплуатации и 1,0 при расчетах для стадии строительства.
Опрокидывающие силы следует принимать с коэффициентом надежности по нагрузке, большим единицы.
Удерживающие силы следует принимать с коэффициентом надежности по нагрузке для постоянных нагрузок Уf<1, для временной вертикальной подвижной нагрузки от подвижного состава железных дорог, метрополитена и трамвая yf=1.
При расчете фундаментов опор мостов на устойчивость против сдвига по основанию сила Qr (см. рис. 7.7) стремится сдвинуть фундамент, а сила трения его о грунт Qz (по подошве фундамента) сопротивляется сдвигу. Сила Qz равна µFv> где µ - коэффициент трения фундамента по грунту.
В соответствии с требованиями СНиП 2.05.03-84 устойчивость конструкций против сдвига (скольжения) следует рассчитывать по формуле
Qr≤(yc/yn)Qz, (7.6)
где Qr - сдвигающая сила, кН, равная сумме проекций сдвигающих сил на направление возможного сдвига; ус - коэффициент условий работы, принимаемый равным 0,9; уn - коэффициент надежности по назначению сооружения, принимаемый как и в формуле (7.5); Qz - удерживающая сила, кН, равная сумме проекций удерживающих сил на направление возможного сдвига.
Сдвигающие силы следует принимать с коэффициентом надежности по нагрузке, большим единицы, а удерживающие силы - с коэффициентом надежности по нагрузке, указанным в экспликации к формуле (7.5).
В качестве удерживающей горизонтальной силы, создаваемой грунтом, допускается принимать силу, значение которой не превышает активного давления грунта.
Силы трения в основании следует определять по минимальным значениям коэффициентов трения подошвы фундамента по грунту.
При расчете фундаментов на сдвиг принимают следующие значения коэффициентов трения µ кладки по грунту.
Когда отношение высоты здания к его размерам в плане велико, а также существует большая податливость основания, то под действием ветровых и сейсмических нагрузок возможно опрокидывание здания. Расчет на опрокидывание здания очень важен, так как напрямую связан с конструктивной безопасностью здания в целом.
«Нормы строительства и проектирования многоэтажных железобетонных конструкций» (JZ 102-79) рекомендуют при расчете на опрокидывание здания придерживаться следующего отношения удерживающего момента M R к опрокидывающему M ov:
«Правила строительства и проектирования многоэтажных железобетонных конструкций» (JGJ 3-91) тот же расчет ведут по условию:

«Строительные нормы сейсмостойкого проектирования» (GB 50011-2001) предписывают при сочетании нагрузок, в которые входят сейсмические воздействия, коэффициенты сочетания принимать равными 1,0. Для многоэтажных зданий с отношением высоты к ширине больше 4 не допускается отрицательное давление под подошвой фундамента, а также области с нулевым давлением. В остальных зданиях область нулевого давления не должна превышать 15% площади фундамента.
Согласно «Технической инструкции по проектированию конструкций высотных зданий» (JGJ 3-2002) для зданий с отношением высоты к ширине больше 4 в основании фундаментов не должно быть области нулевых напряжений; для зданий с отношением меньше 4 область нулевых напряжений допускается не более 15% площади фундамента.
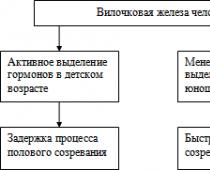
Схема фундамента

1 — верхняя часть; 2 - подвал; 3 - расчетная точка сопротивления опрокидывающему моменту; 4 - нижняя грань фундамента
- Опрокидывающий и удерживающий моменты
Пусть площадь воздействия момента опрокидывания является площадью его основания, а сила воздействия - горизонтальном сеисмическои нагрузкой или горизонтальной ветровой нагрузкой:
где M ov - опрокидывающий момент; Н - высота здания; С - глубина подвала; V 0 - суммарные значения горизонтальной силы.
Удерживающий момент вычисляется в краевых точках от воздействия суммарных нагрузок:

где М R - удерживающий момент; G - суммарные нагрузки (постоянные нагрузки, ветровые и снеговые нагрузки с пониженным нормативным значением); В - ширина подвала.
- Регулирование удерживающего момента и область нулевых напряжений в основании фундамента
К расчету удерживающего момента

Предполагаем, что линии действия суммарных нагрузок проходят через центр основания здания (рис. 2.1.4). Расстояние между этой линией и равнодействующей эпюрой напряжений основания e 0 , длина области нулевых напряжений В-х, отношения длины области нулевых напряжений и длины основания (В - х)/В определяются по формулам:

Отсюда получим:

Из формул получено отношение площади области нулевых напряжений и площади основания для безопасного удерживающего момента.
Зоны нулевого напряжения основания и условие опрокидывания конструкций
|
Соотношение моментов (MR/M ov) |
|||||
|
Процент зон нулевого напряжения (В-Х)/В |
0 (все сечения под напряжением) |
||||
Динамической остойчивостью называется способность судна противостоять, не опрокидываясь, динамическому воздействию внешних моментов.
До сих пор при рассмотрении вопросов остойчивости предполагалось, что кренящий момент действует на судно статически, т.е. кренящий момент m кр был равен восстанавливающему моменту m Θ . Это могло быть:
1) либо при столь медленном нарастании m кр, что в любой момент осуществлялось равенство m кр = m Θ ;
2) либо в положении судна, когда с момента m кр приложения прошло достаточно много времени.
В действительности во многих случаях кренящий момент прикладывается к судну динамически (накат волны, шквальный ветер и т.п.). В этих случаях нарастание кренящего момента происходит быстрее, чем восстанавливающий момент и равенство между моментами не соблюдается. В результате процесс наклонения судна совершается с ускорением.
Наибольший угол крена, которого достигает судно при наклонении с ускорением, называется динамическим углом крена Θ дин. Величина Θ дин значительно превышает величину статического угла крена Θ с (при m кр.дин = m кр.ст). Возможен случай, когда при значительном угловом ускорении величина Θ дин окажется настолько большой, что судно опрокинется (при неопасном для судна статическом приложении равного по величине m кр).
В теории судна при изучении динамических наклонений обычно делается допущение, что вода и воздух не оказывают сопротивления такому наклонению; это допущение приводит к погрешности в безопасную сторону.
3.11.1 Наклонение судна при динамическом воздействии кренящего момента. Предположим, что к судну, имеющему Θ = 0, динамически приложен момент m кр, который затем продолжает действовать статически, не изменяясь по величине с изменением угла крена Θ (рис. 3.25).
На участке наклонения судна от Θ = 0 до Θ ст, когда m кр > m Θ , происходит накопление кинетической энергии за счет избыточной работы кренящего момента, угловая скорость растет dΘ/dt, угловое ускорение d 2 Θ/dt 2 положительное, но величина его уменьшается вследствие противодействия восстанавливающего момента. При Θ = Θ ст, когда m кр = m Θ , скорость наклонения судна и кинетическая энергия достигают максимальных значений, а ускорение равно нулю.
На участке наклонения судна от Θ ст до Θ дин, когда m кр < m Θ , накопленная ранее кинетическая энергия погашается противоположной по знаку избыточной работой восстанавливающего момента, скорость наклонения уменьшается, ускорение отрицательное и с нарастанием угла Θ величина его растет. Наклонение судна прекращается в точке Θ дин, в которой наблюдается равенство работ кренящего А кр и восстанавливающего моментов А Θ . Эти работы можно записать как

Рисунок 3.25 – К рассмотрению динамических наклонений
Положение судна с Θ = Θ дин не является положением равновесия. Под действием избыточного восстанавливающего момента судно начнет спрямляться (до Θ = Θ ст ускоренно, а затем замедленно) и придет в положение Θ = 0 (при отсутствии сил сопротивления) с нулевой угловой скоростью. После этого явление повторяется - судно будет колебаться около положения Θ = Θ ст. При отсутствии сопротивления этим колебаниям со стороны воды и воздуха они могли бы продолжаться бесконечно. В действительности судно совершает в рассматриваемом случае затухающие колебания и в итоге останавливается в положении равновесия с углом Θ ст.
3.11.2 Определение динамического угла крена судна. Запас динамической остойчивости. Величину угла Θ дин при воздействии на судно момента m кр заданной величины можно найти с помощью равенства работ А кр = А Θ при наклоне Θ = Θ дин
(m кр – m Θ) dΘ = 0,
или (m кр – m Θ) dΘ + (m кр – m Θ) dΘ = 0
или (m кр – m Θ) dΘ = (m Θ – m кр) dΘ,
 где интеграл (m кр – m Θ) dΘ = δА кр выражает собой избыточную работу кренящего момента на участке наклонения судна от Θ = 0 до Θ ст, а интеграл (m Θ – m кр) dΘ = δА Θ - избыточную работу восстанавливающего момента на участке наклонения судна от Θ ст до Θ дин.
где интеграл (m кр – m Θ) dΘ = δА кр выражает собой избыточную работу кренящего момента на участке наклонения судна от Θ = 0 до Θ ст, а интеграл (m Θ – m кр) dΘ = δА Θ - избыточную работу восстанавливающего момента на участке наклонения судна от Θ ст до Θ дин.
Рисунок 3.26 – К определению динамических углов крена судна.
На рис. 3.26 работа кренящего момента А кр представляет собой прямоугольник ОКВD, а работа восстанавливающего момента А Θ – криволинейную трапецию ОАМВD. Заштрихованные площади 1(ОКА) и 2 (АМВ) соответствуют избыточным работам кренящего δА кр и восстанавливающего моментов δА Θ .
Следовательно, угол Θ дин может быть определен по диаграмме статической остойчивости графически из условия равенства по величине площадей 1 и 2.
Как видно из рис. 3.26, при типичном виде диаграммы статической остойчивости Θ дин » 2 Θ ст.
Из сказанного выше очевидно, что работа восстанавливающего момента может служить мерой динамической остойчивости судна. Площадь на ДСО под кривой m Θ (Θ) ОАМВN (на рис. 3.26), характеризующую собой работу А Θ , называют запасом динамической остойчивости судна (ЗДО). Чем больше эта площадь, тем большей динамической остойчивостью обладает судно при плавании в прямом положении. При рассмотрении рисунка 6.3, становится очевидным, что чем меньше метацентрическая высота судна, тем меньше не только запас статической остойчивости, но и динамической. При плавании судна со статическим углом крена Θ ст.1 запас динамической остойчивости уменьшается и на рисунке 3.26 он определяется только площадью АМВ между кривой m Θ (Θ) и m кр (Θ).
3.11.3 Пределы динамической остойчивости судна. Такими пределами являются:
Максимальный кренящий момент m кр.дин. max , динамическое приложение которого еще не вызывает опрокидывание судна (опрокидывающий момент );
Максимальный динамический угол крена Θ дин. max .
Для нахождения величин m кр.дин. max и Θ дин. max можно использовать диаграмму статической остойчивости (рис. 6.11). По мере увеличения m кр. угол Θ дин растет. При некотором m кр. = m кр.дин. max , что соответствует предельному случаю равенства площадей 1 и 2, когда еще может быть обеспечено равенство избыточных работ восстанавливающего и кренящего моментов, угол Θ дин = Θ дин. max . Следовательно, Θ дин. max определяется точкой пересечения графика m кр (Θ), отвечающего m кр.дин. max , с нисходящей ветвью ДСО.
Если при динамическом приложении кренящего момента его величина m кр > m кр.дин. max , то избыточная работа кренящего момента уже не может быть полностью погашена избыточной работой восстанавливающего момента, и судно опрокинется. При статическом приложении такого же по величине момента m кр безопасность плавания судна обеспечивается, если только m кр £ m кр.ст. max . Из рис. 3.26 видно, что m кр.дин. max < m кр.ст. max .
Таким образом, динамическая остойчивость судна при воздействии m кр заданной величины обеспечена, если динамический угол крена не превосходит значения, при котором работа кренящего момента еще может быть компенсирована работой восстанавливающего момента.
3.11.4 Диаграмма динамической остойчивости судна. Для решения задач динамической остойчивости удобно использовать диаграмму динамической остойчивости (ДДО), которая определяет работу восстанавливающего момента А Θ при каждом значении угла Θ (рис. 3.27).
Как известно, работа восстанавливающего момента по углу крена может быть представлена выражением
А Θ = m Θ dΘ,

Рисунок 3.27 – Диаграмма динамической остойчивости
где функция m Θ (Θ) представляет собой диаграмму статической остойчивости (ДСО).
Таким образом, ДДО является интегральной кривой по отношению к ДСО. Как всякая интегральная кривая, она обладает следующими свойствами:
1) каждая ее ордината выражает собой площадь под ДСО по эту ординату;
2) точка перегиба (точка В) соответствует максимуму ДСО;
3) максимум интегральной кривой (точка С) соответствует углу заката ДСО;
4) ордината ДДО при Θ = Θ зак определяет собой запас динамической остойчивости судна в прямом положении равновесия;
5) тангенс угла касательной, проведенной к диаграмме динамической остойчивости, определяет ординату диаграммы статической остойчивости при том же угле крена.
Так как m Θ = γV l Θ , то выражение для работы восстанавливающего момента можно записать в виде
А Θ = m Θ dΘ = γV l Θ dΘ = γV l Θ dΘ = γV l дин,
Отыскание Мопр сводиться к определению такой горизонтали AF которая ограничивает площадь сегмента BCF, равную площади OAB. При этом определяеться и приельный динамический угол крена Ɵмах. Момент больше ОА, будет больше востонавливающего и судно опрокинеться.
23.Определение динамического опрокидывающего момента при прямом начальном положении по диаграмме Lд.

Для определения опрокидывающего момента нужно провести касательную к ДДО. Точка соприкосновения даст М опр как ординату касательной. При этом абсцисса точки касания определит наибольший динамический угол крена Ɵопр.
24. Определение опрокидывающего момента при качке судна по диаграмме lст
Остойчивость на больших углах крена . По мере увеличения крена судна восстанавливающий момент сначала возрастает, затем уменьшается, становится равным нулю и далее не только не препятствует наклонению, а наоборот, способствует ему (рис. 6).

Рис. 6. Диаграмма статической остойчивости.
Так как водоизмещение для данного состояния нагрузки постоянно, то восстанавливающий момент изменяется только вследствие изменения плеча поперечной остойчивости l ст . По расчетам поперечной остойчивости на больших углах крена строят диаграмму статической остойчивости , представляющую собой график, выражающий зависимость l ст от угла крена. Диаграмму статической остойчивости строят для наиболее характерных и опасных случаев нагрузки судна.
25. Определение опрокидывающего момента при качке судна по диаграмме ld

Из точки А проводится касательная АС к диаграмме динамической остойчивости, и от точки А на прямой, параллельной оси абсцисс, откладывается отрезок АВ, равный одному радиану. Из точки В восстанавливаем перпендикуляр ВЕ до пересечения с касательной АС в точке Е. Отрезок ВЕ равен плечу lопр опрокидывающего момента, если диаграмма
построена в масштабе плеч. Опрокидывающий момент
Mc = 9, 81 ·∆ · lопр, кН × м.
26. Связь диаграмм статической и динамической остойчивости
Диаграммы статической и динамической остойчивости

Обычно в судовых условиях строят диаграмму динамической остойчивости по известной диаграмме статической остойчивости, схема вычислений плеч динамической остойчивости приведена в табл:

Диаграмма динамической остойчивости

При построении диаграммы динамической остойчивости по результатам вышеприведенной таблицы динамический кренящий момент принимают постоянным по углам крена. Следовательно, его работа находится в линейной зависимости от угла θ, а график произведения f(θ) = 1кр*θ изобразится на диаграмме динамической остойчивости прямой наклонной линией, проходящей через начало координат. Для ее построения достаточно провести вертикаль через точку, отвечающую крену в 1 радиан и отложить на этой вертикали заданное плечо 1кр. Прямая, соединяющая таким образом точку Е с началом координат О представит искомый график f(θ) =1кр*θ , т. е. график работы кренящего момента, отнесенный к силе веса судна Р. Эта прямая пересечет диаграмму динамической остойчивости в точках А и В. Абсцисса точки А определяет угол динамического крена θ, при котором имеет равенство работ кренящего и восстанавливающего моментов.
Точка В практического значения не имеет.
Динамическая устойчивость электропривода – это способность системы электропривода восстанавливать равновесие при резком изменении режима ее работы.
Асинхронный двигатель при медленно изменяющемся возмущении можно постепенно нагружать до значения опрокидывающего момента.
Но при быстром изменении возмущения динамический момент , алгебраическискладываться с электромагнитным моментом двигателя .
За счет алгебраического сложения динамического момента с электромагнитным моментом система привода развивает момент сверх критического (максимального) момента двигателя при уменьшении скорости и уменьшает развиваемый приводом момент, до значения меньше – критического, при возрастании скорости системы электропривода.
Таким образом, соотношение перестает быть критерием устойчивой работы электропривода. Инерция и запасенная системой энергия имеет большее влияние на работу привода.
Падение напряжения сети
Падение напряжения сети является наиболее характерным резким изменением режима работы электропривода. Падение напряжения в судовой сети может возникнуть: при пуске мощных двигателей или отключении одного из параллельно работающих генераторов.
Двигатель, работающий при статическом моменте на естественной механической характеристике в точке «А» (рис 12-3а.), при снижении напряжения с той же скоростью перейдет в точку «В» на искусственной характеристике.
Под действием возникшего динамического момента, величина которого определяется длиной отрезка «А – В», двигатель будет затормаживаться в соответствии с уравнением движения до полной остановки, точка «D» на искуственной характеристке (ИМХ):
![]() (12-3)
(12-3)
Воспользовавшись соотношенияими: иполучим:
![]() (12-4)
(12-4)
Влияние величины напряжения сети на устойчивость электропривода. Опрокидывание электродвигателя
Рассмотрим влияние напряжения сети на устойчивость электропривода переменного тока.
При глубоких провалах напряжения сети работа асинхронного двигателя становится неустойчивой – двигатель может опрокинуться.
Под опрокидыванием понимают аварийный режим асинхронного двигателя; при котором он останавливается или реверсирует . Условие опрокидывания такое:
М"< М ,
где М" - критический момент двигателя при пониженном напряжении;
М - статический момент механизма.
Иначе говоря, опрокидывание наступит, если критический момент двигателя станет меньше статического момента механизма .
Напомним, что критический момент асинхронного двигателя пропорционален квадрату напряжения:
М = с, (12-5)
где U и f - соответственно напряжение и частота тока питающей сети.
Отсюда следует, что при допускаемом Правилами Регистра провале напряжения
сети, равном 15% (U " = 0,85U ) , новое, пониженное значение критического момента составит
М" = М= (0,85)М= 0,7225 М≈ 0,7 М. (12-6)
Последствия опрокидывания зависят от характера статического момента механизма, а именно:
1. при реактивном статическом моменте двигатель останавливается и переходит в режим стоянки под током (насосы, вентиляторы Рис.12.3а);
2. при активном статическом моменте двигатель вначале останавливается, затем реверсирует и под действием веса груза начинает разгоняться с возрастающей скоростью в направлении на спуск (грузоподъемные механизмы и якорно-швартовные устройства Рис.12.3б).

Рис.12.3а Рис. 12.3б
Рис. 12.3. Переходные процессы при опрокидывании двигателя: а – при реактивном статическом моменте (насос, вентилятор); б – при активном статическом моменте (лебедка, брашпиль).
Рассмотрим процесс опрокидывания двигателя при реактивном статическом моменте исполнительного механизма (Рис.12.3а). До провала напряжения двигатель работает на естественной механической характеристике (ЕМХ), в точке «А» с постоянной скоростью ω.
При провале напряжения двигатель переходит из точки «А» на естественной механической характеристике (ЕМХ) в точку «В» на искусственной механической характеристике (ИМХ) с той же скоростью ω.Скорость электродвига теля не успевает измениться вследствие инерции движущихся частей электропривода, поэтому в точке «В» скорость такая же, как и в точке «А».
Поскольку в точке «В» момент двигателя М меньше момента механизма М , двигатель начинает уменьшать скорость до точки «С». В этой точке критический (максимальный) момент двигателя М "< М , поэтому двигатель продолжит уменьшать скорость до точки Д.
В точке Д двигатель остановится и будет стоять под током с моментом короткого замыкания М до тех. пор, пока не сработает тепловая защита.
Рассмотрим процесс опрокидывания двигателя при активном статическом моменте исполнительного механизма . Механизмы с активным статическим моментом (грузовые лебёдки, брашпили) при опрокидывании реверсируют под действием веса груза или якоря (Рис.12.3б).
В случае провала напряжения судовой сети переходный процесс сначала протекает так же, как в случае с реактивным статическим моментом (Рис.12.3а). Однако после перехода двигателя в точку «Д», двигатель не остановится , а сразу реверсирует и разгоняется в обратном направлении (точки F, F, F).
Поскольку знак электромагнитного момента двигателя не из менился , т.е. направлен в сторону подъёма груза, двигатель перейдёт в режим тормозного спуска и будет стараться уменьшить скорость спуска груза.
Однако при этом скорость спуска груза будет непрерывно увеличиваться . Это объясняется тем, что величина тормозного электромагнитного момента двигателя по мере перехода из точки F в точку Fи далее в точку Fнепрерывно уменьшается (М < М < М ) а величина активного статического момент не изменяется и направлена в сторону спуска груза.
Если электродвигатель своевременно не отключить от сети и не затормозить механическим тормозом, такой режим приведёт к аварии.